
星动纪元ERA-42:原生机器人大模型实现五指灵巧手百种任务操作
近日,星动纪元公司正式揭晓了其最新研发成果——端到端原生机器人大模型ERA-42,这一创新技术引发了业界广泛关注。
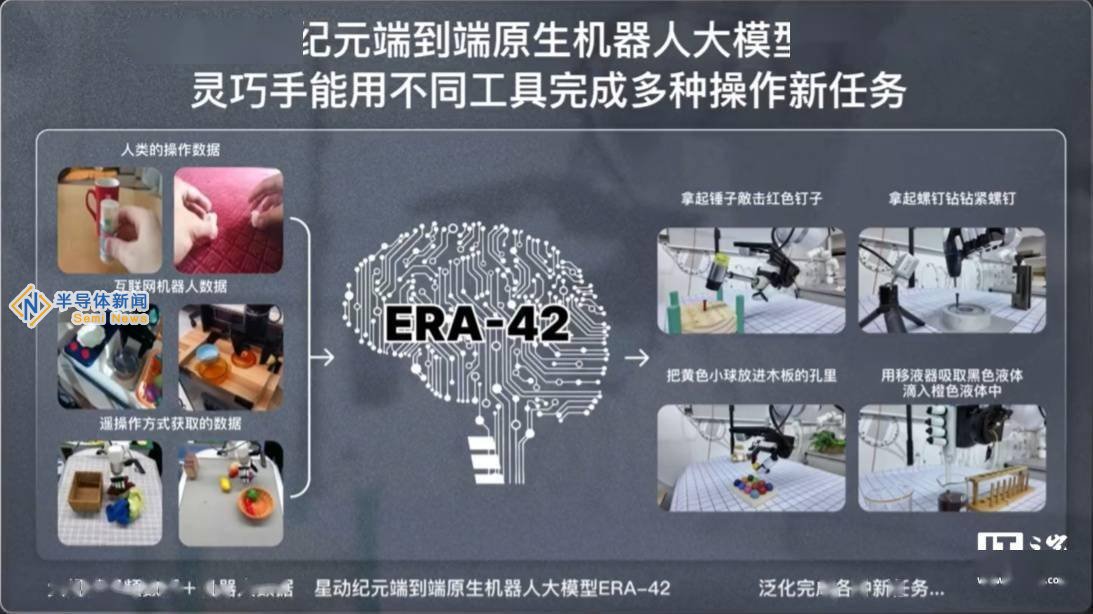
据官方介绍,ERA-42实现了前所未有的技术突破,通过单一具身大模型,成功驱动五指灵巧手执行多样复杂的操作任务,其灵活程度媲美人类手部。这一成就标志着业界在机器人技术领域的重大进步。
更令人惊叹的是,ERA-42模型无需任何预编程技能,仅凭其强大的泛化和自适应能力,在极短时间内便能学会新任务。具体而言,该模型能在不到两小时的时间内,通过收集少量数据,迅速掌握并执行新的操作任务。

基于ERA-42的强大能力,星动纪元推出的五指灵巧手星动XHAND1已能够熟练使用各种工具,完成超过100种复杂且灵巧的操作任务。例如,它能够拿起桌上随机放置的螺钉钻并准确钻紧螺钉,使用锤子敲打钉子,甚至能将倒放的水杯扶正并倒入水。

研究还表明,随着ERA-42模型规模的扩大,其任务成功率显著提升,初步展现了类似于大语言模型训练中的“Scaling效应”。这一发现进一步证实了模型规模与性能之间的正相关关系,为未来的机器人技术发展提供了有力支撑。
星动纪元的这一创新成果不仅展示了机器人在执行复杂任务方面的巨大潜力,也为推动人工智能和机器人技术的深度融合与发展开辟了新道路。
(文章为作者独立观点,不代表半导体新闻网立场,版权疑问请联系客服。)





站内头条

投资8.5亿美元,全球首座金刚石晶圆厂明年量产
2024-12-18
台积电2nm芯片2025年底量产在即,良率提升6%助力成本节省
2024-12-04
Rapidus与电装将共享先进芯片设计方法
2024-10-17
第三季度,光刻机龙头ASML净利润达21亿欧元,但新订单低于预估
2024-10-17
随着 AI 公司争夺高带宽存储芯片,美光的股价飙升
2024-09-26